
RAT MKI
(2024)
Key Features:
-
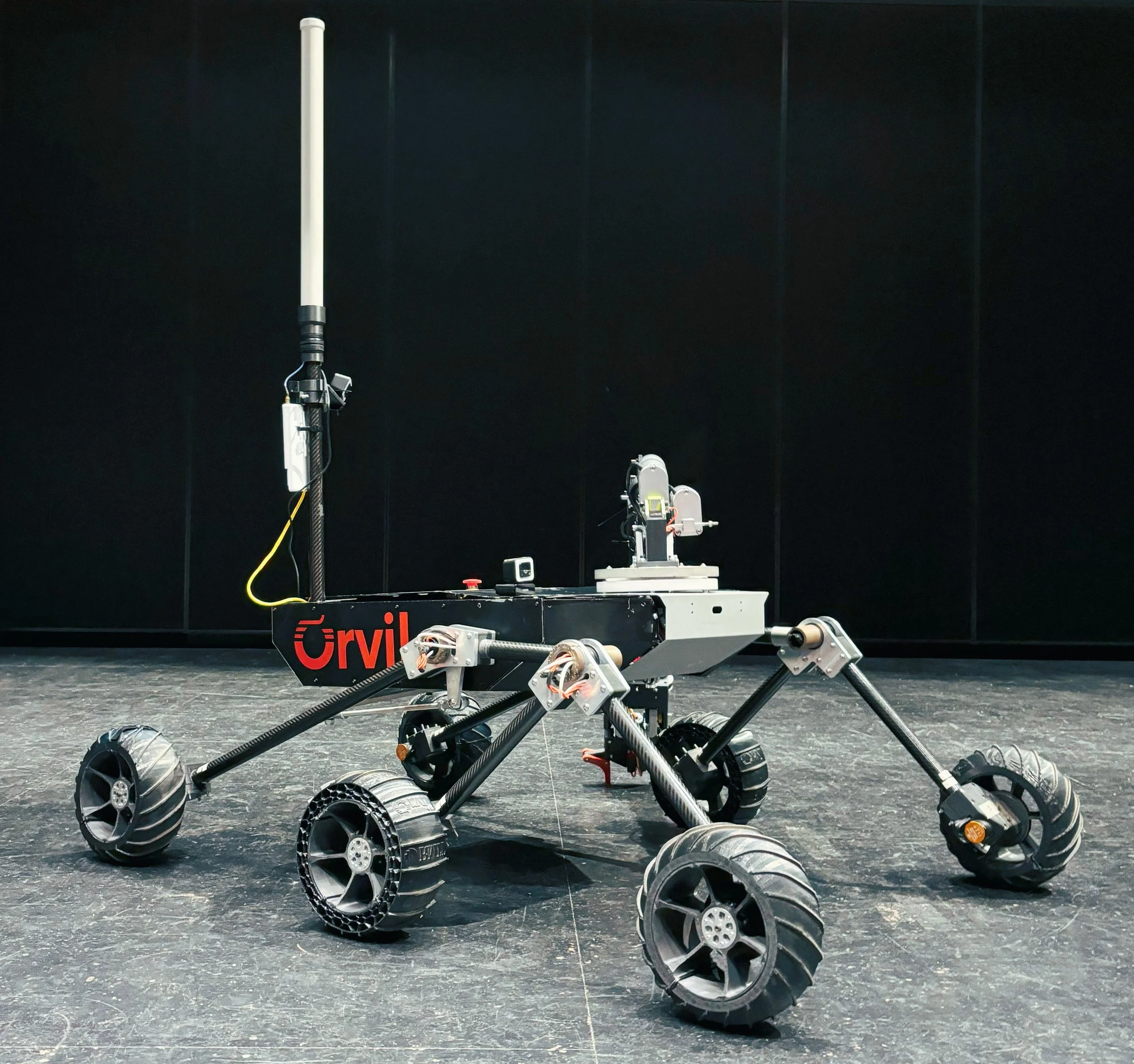
6-wheel rocker-bogie suspension system
-
Interchangeable rover payload configurations
-
Data-learning algorithm for autonomy
-
Custom robotic arm and excavator for regolith extractions
About:
RAT MKI is our first design in the RAT rover series. Built in 2023, it faced other rovers competing in the 2024 Australian Rover Challenge. It features a completely overhauled chassis, wheels, and suspension systems, while retaining the main arm and several internal components from our previous rover.
Past Competition:
Australian Rover Challenge 2024 – Overall: 7/14
SAR: 8th
Post-Landing: 8th
Space Resources: 4th
Mapping & Autonomous: 7th
Specifications:
-
Weight: 36kg base weight
-
Dimensions: 985mm x 1000mm x 510mm
-
Wheels: 3D printed (TPU) with a common airless tire design based on hexagons
-
Chasis Build: Aluminium frame
-
Suspension: Rocker-bogie system
-
Power: 2x 22.2V, 6-cell, 10Ah LiPO batteries
-
Motors and gearboxes: BLDC motors with planetary gearboxes
-
Chassis and Arm Motor Controllers: Custom CAN-Bus Motor Drivers
-
Communication: 5.6Ghz radio
-
Vision: ZED 2i stereovision camera
-
Sensors: Sensecap S-Temp&VWC&EC-02, Honeywell SS494B
-
Sensing system: Water and ilmenite sensors
-
Autonomous: Light Detection and Ranging (LiDAR) system, stereovision camera, Jetson Orin NX